Система стабилизации полёта (автопилот)
HeliCommand Rigid
Начиная с 2006 года, когда я впервые взял в руки пульт управления R/C вертолётом, я мечтал об автопилоте. И вот спустя много лет, я соблазнился и купил автопилот HeliCommand. Не смотря на свою сравнительно высокую стоимость ($500 с доставкой), прибор может оказаться крайне полезен для новичков и любителей использования видеоаппаратуры. Новичкам эта система позволит избежать аварий и практически окупит себя, после нескольких успешных аварийных посадок (с учётом возможной стоимости ремонта, которой удалось избежать). Для любителей видеоустройств (фото, видео, FPV) на вертах, позволяет отвлекаться во время полёта от пилотирования, что крайне опасно делать без стабилизации. Естественно, для профессионалов любящих 3D экстремальное пилотирование, подобное устройство может оказаться излишним, хотя производитель заявляет о поддержке 3D пилотажа. Однако нужно понимать, что система только корректирует полёт по плоскости скольжения и не сможет спасти в случае грубых ошибок экстремального пилотажа.
|
Стабилизация полёта
|
Аварийное позиционирование
|
Стабилизация видеосъемки
|
Настойка системы
Перед тем как купить HeliCommand, нужно чётко определиться зачем вам это нужно. Если вы профессиональный пилот и уверенно управляете вертолетом, то в принципе эта игрушка вам не нужна. Если всё же вы решились поэкспериментировать, то нужно приготовиться к серьёзным научным исследованиям.
Первым делом, нужно грамотно установить прибор на вертолёт. У меня HeliCommand установлен на задней балке, что не мешает ему просматривать землю и исключает ненужные вибрации. Хотя можно установить в любом месте, даже боком на хвостовую балку, главное чтоб прибор крепко держался и лазер ничем не перекрывался. Обязательно закрепите HeliCommand на липучую ленту - она снизит вибрации и жёстко его приклеит к корпусу, чтоб не болтался. Я для надёжности прихватил двумя стяжками.

Официальные рекомендации по установке HeliCommand
Подключить HeliCommand к компьютеру можно через специальный USB кабель, который обычно прикладывается в комплекте.
Далее загружаем программное обеспечение и устанавливаем его на компьютер:
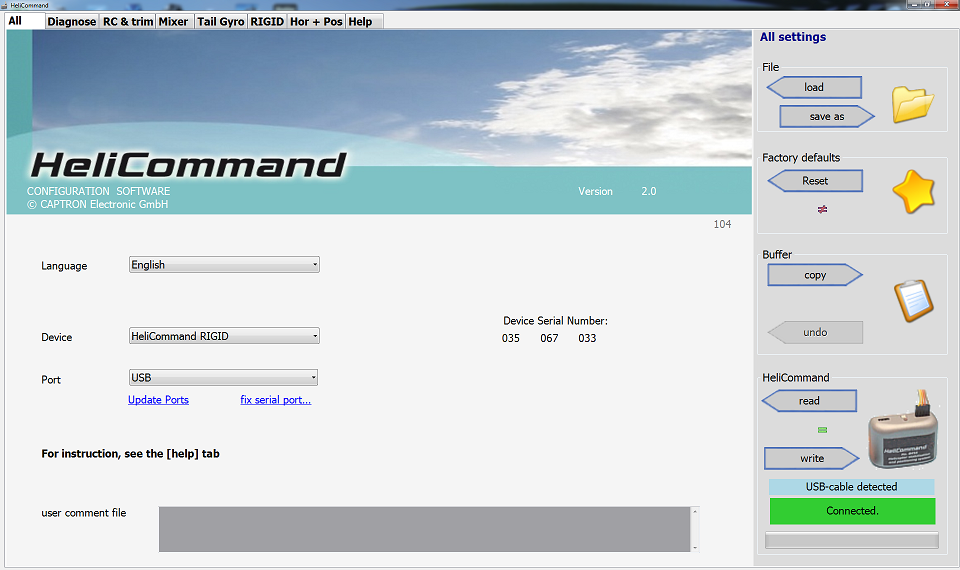
HeliCommand Configuration Software
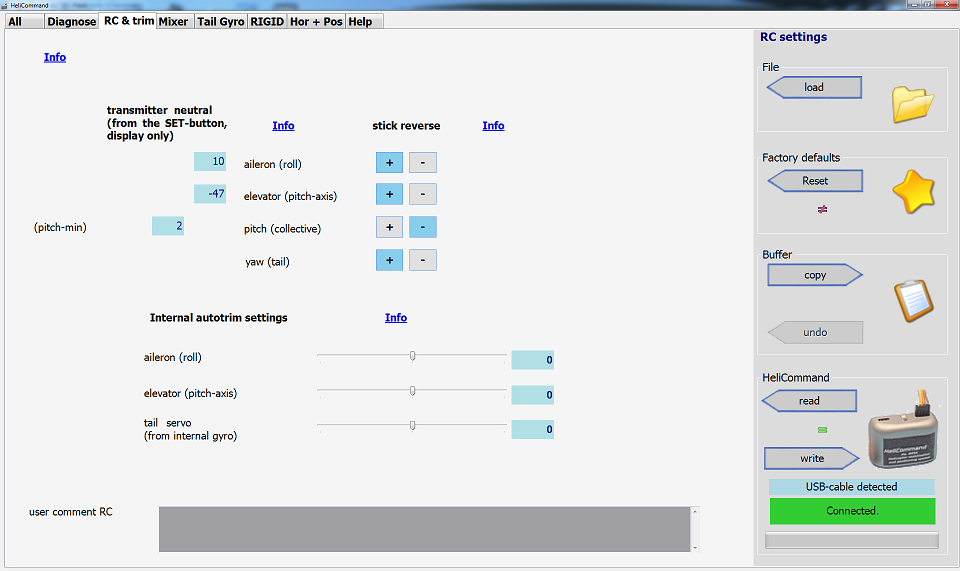
Надеюсь Вам удалось установить модуль HeliCommand на вертолёт и подключить его к компьютеру с помощью специального USB кабеля. Если соединение прошло успешно, то должна загореться зелёная кнопка Connected. Запустив программу, необходимо синхронизировать её с вашим модулем HeliCommand. Для этого нажимаем read , таким образом мы выгрузили данные из модуля. Чтобы записать какие-либо изменения, нужно нажать write . Если хотите вернуть исходные заводские настройки, нажмите Reset . Для сохранения и загрузки резервной копии: load save as . Помните, пока не будет синхронизации - к остальным пунктам меню доступ вы не получите, ибо выгруженных данных нет.
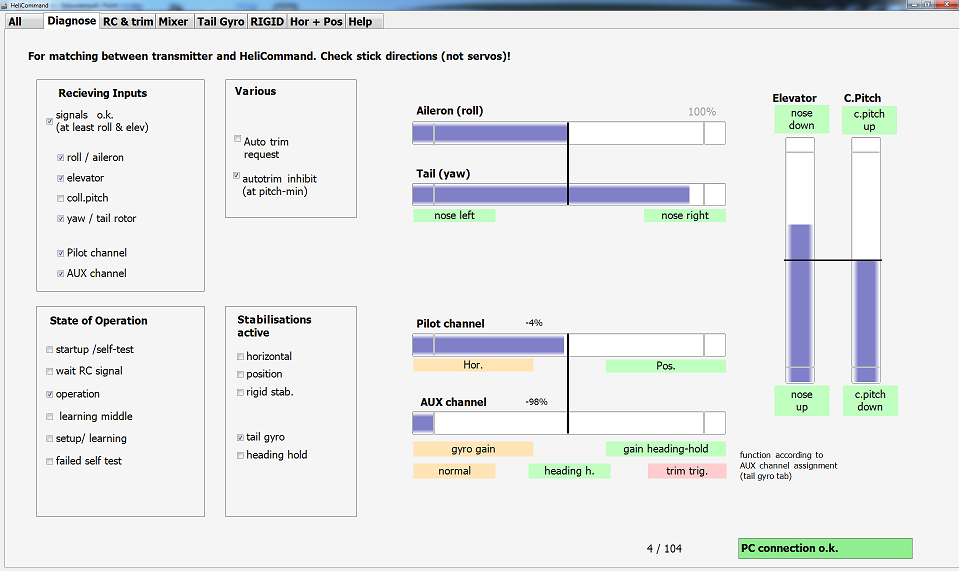
Диагностика. Показывает работу всех каналов сервомашинок. Учтите, что это выходные (контрольные) сигналы, которые будут переданы на управление вертолётом, с учётом всёх корректировок, микшеров и триммеров. Это не данные вашего пульта управления, так как подключая вертушку к HeliCommand, вы практически полностью передаёте управление автопилоту и теперь он здесь главный пилот !!!
Триммирование. Сигнал от вашего передатчика идёт на HeliCommand и обрабатывается с учётом физического положения вертолёта в пространстве. Рекомендуется на передатчике все триммера (тонкие корректировки отклонения стиков) перевести в нейтральное положение, так как HeliCommand всё равно сам установит свои корректировки. На начальной стадии настройки, лучше их не трогать без особой надобности, так как HeliCommand даже в полёте автоматически корректирует возникающие отклонения.
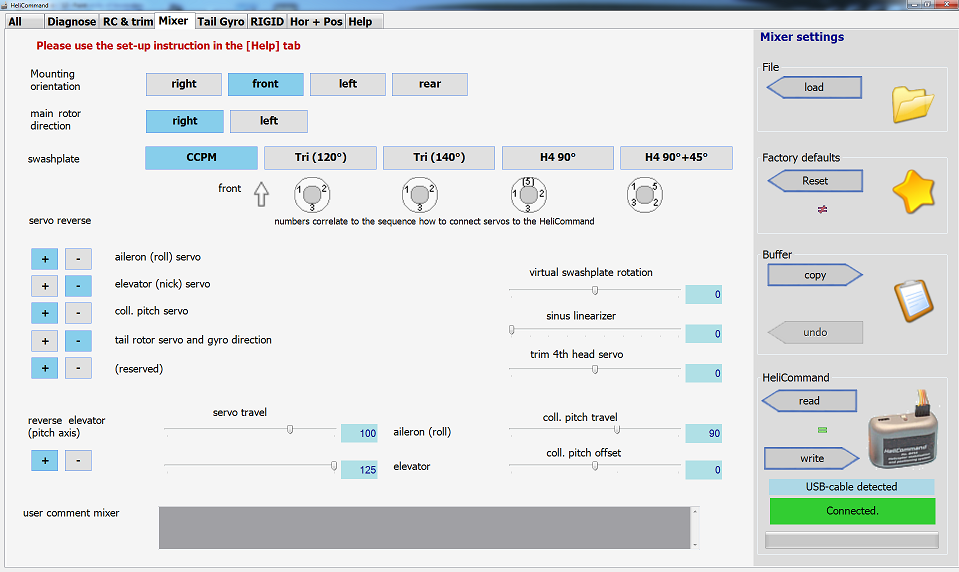
Микшеры. Пожалуй самый ответственный участок настройки HeliCommand. Сначала нужно определить, какой тип автомата перекоса вы используете на вашем вертолёте.
SwashPlate или просто Свош - основной элемент системы автомата перекоса вертолёта. Может иметь несколько модификаций, в зависимости от которых осуществляется базовая настойка HeliCommand.| Scale Mechanics | CCPM (Cyclic-Collective Pitch Mixing) | Flybarless |
 |
 |
 |
| Автомат перекоса механического шага атаки несущих лопастей. Наклон лопастей осуществляется механической тягой от отдельно установленной серво машинки. Используется на старых моделях R/C вертолётов. | Автомат перекоса виртуального шага атаки несущих лопастей. Наклон лопастей совмещён с наклоном тарелки перекоса, методом программного микширования. Когда наклон тарелки перекоса и перемещение по высоте, производится одновременно тремя сервомашинками. | Автомат перекоса виртуальной сервооси. Используется специальный модуль гироскопов, которые в полёте вычисляют отклонение вертолёта и корректируют работу тарелки перекоса. Отпадает необходимость в оси серво лопаток. |
|
|
||
Перед настройкой автомата прекоса, нужно напомнить о заводских требованиях HeliCommand к аппаратуре управления, с которым он будет работать. В инструкции написано, что на пульте управления (передатчике) должны быть полностью отключены все микшеры. Микшеры (Mixer) это заложенные в настройки пульта программируемые синхронные движения нескольких тяг сервомашинок одновременно. Например, при увеличении оборотов двигателя - одновременно увеличивается угол наклона лопастей и наоборот. Обычно микшеры заложены в настройки профиля вертолёта по умолчанию в рамках программного обеспечения пульта. Однако у разных фирм по своёму устроены профили. Я на своём Multiplex так и не смог отключить микшеры, хотя может плохо искал. В теории, можно задать настройки примитивной модели и совместить этот профиль со свошем HeliCommand. Мне на моём Hawk Pro микшеры отключить не удалось и потому я наложил их на микшеры HeliCommand - то есть они стали повторять друг друга, что в принципе позволило вертолёту успешно летать во всех полётных режимах.
swashplate тип своша или автомата перекоса. На моём Hawk Pro c механическим (Scale Mechanics) свошем, опция CCPM автоматически установила все настройки в нужном положении, мне осталось только слегка подправить расходы серво машинок. Однако на Predator, с виртуальным свошем CCPM, пришлось повозиться, так как у меня тяга элеватора (наклона вперёд-назад) была не спереди, а сзади своша. Обратите внимание на направление движения вертолёта (помечено стрелкой front) и расположение основных тяг (сервомашинок) - это очень важно. Если тяги расположены у вас иначе чем на схеме, возможно придётся их корректировать реверсами. Tri 120 - Tri 40 это угол расположения тяг на своше, который определяется модификацией вертолёта при его проектировании. Если вы правильно установили тип своша, то автомат перекоса должен чётко выполнять все наклоны в нужном направлении без искажений !!! иначе ваш вертолёт не сможет полететь.
virtual swashplate rotation - изменение угла установки тяг на своше или направление своша. Важная опция, изменяя которую вы можете достигнуть нужных отклонений при настройке виртуального CCPM.
coll. pitch travel - уровень движения виртуального изменения наклона лопастей и оборотов двигателя.
servo reverse - реверсы сервомашинок. Направление работы тяг сервомашинок.
servo travel - расходы сервомашинок. Угол отклонения тяг на сервомашинках - нужен для тонкой настройки полётных характеристик. На пульте все триммера (тонкие корректировки отклонения стиков рычажков) нужно обнулить в исходное нулевое значение.
Mounting orientation - какой стороной установлен датчик HeliCommand на вертолёте по направлению движения. Установка возможна во всех 4 положениях лазером вниз.
Main rotor direction - направление движения вала несущих лопастей.
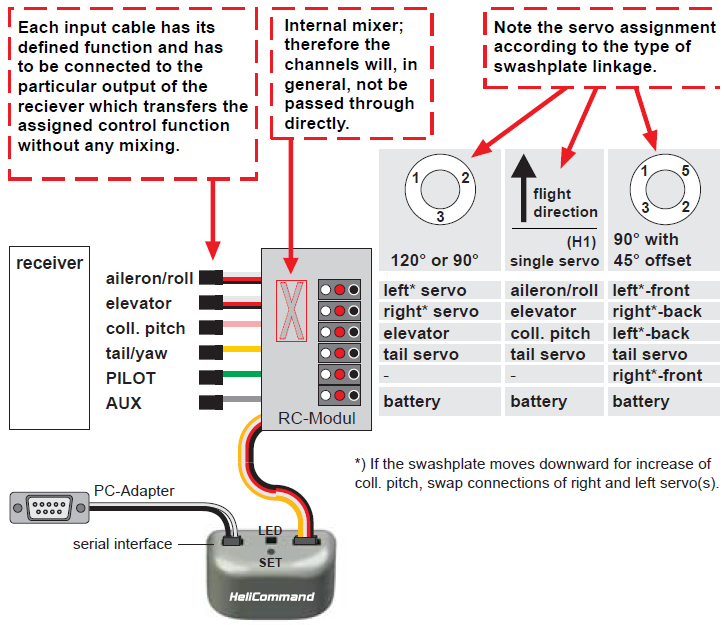
Важно грамотно подключить сервомашинки на модуль HeliCommand. На схеме показаны различные варианты подключения, в зависимости от типа своша:
Обязательно в самом начале подключения, выберите на своём пульте свободный 3-ёх канальный переключатель и выделив ему отдельный радиоканал на приёмнике, подключите к нему HeliCommand. На модуле HeliCommand имеется световой диод LED, который отображает состояние автопилота. При подключении питания от батареи, у меня частенько происходит сбой подключения, когда HeliCommand помигав красной лампочкой в попытке самотестирования, в итоге продолжает мигать красным огоньком выдавая сбой, без подключения базовых режимов Стабилизации, Отключения, Удержания. В таком случае, нужно поставить вертолёт на ровную поверхность и повторить подключение батареи, установив режим в Отключение . Может даже через несколько попыток, обычно всё начинает работать. При переключении всё должно нормально работать и все режимы правильно определяться. Лучше запускать в режиме Отключения , а сам рычажок на пульте выбрать с боку - так удобнее и быстрее.
Для принудительной предполётной стабилизации HeliCommand, можно нажать кнопочку SET и подержать несколько секунд - однако делать это нужно только при новой установке и в дальнейшем подобная операция не требуется.
Может потребоваться переставить ранее установленные каналы сервомашинок на приёмнике вертолёта, для корректной работы с HeliCommand. Если каналы жёстко привязаны в профиле настроек пульта, это может создать определённые проблемы при совместимости с каналами приёма HeliCommand. Одним словом нужно экспериментировать, набравшись терпения и мудрости. Если же ваши моральные силы иссякнут - купите вертолёт со старой системой своша Scale Mechanics и забив на все премудрости виртуального CCPM, просто летайте с автопилотом ;)))
Встроенный гироскоп хвостового оперения
На моём Hawk Pro установлен гироскоп Futaba 401 GYRO with 9254 SERVO который прекрасно стабилизирует работу хвоста. Посему я не стал его отключать и оставил за ним изначально 2 выделенных канала.
Хотя вполне могу предположить следующие настройки, на основе инструкций и опыта эксплуатации гироскопов Futaba:
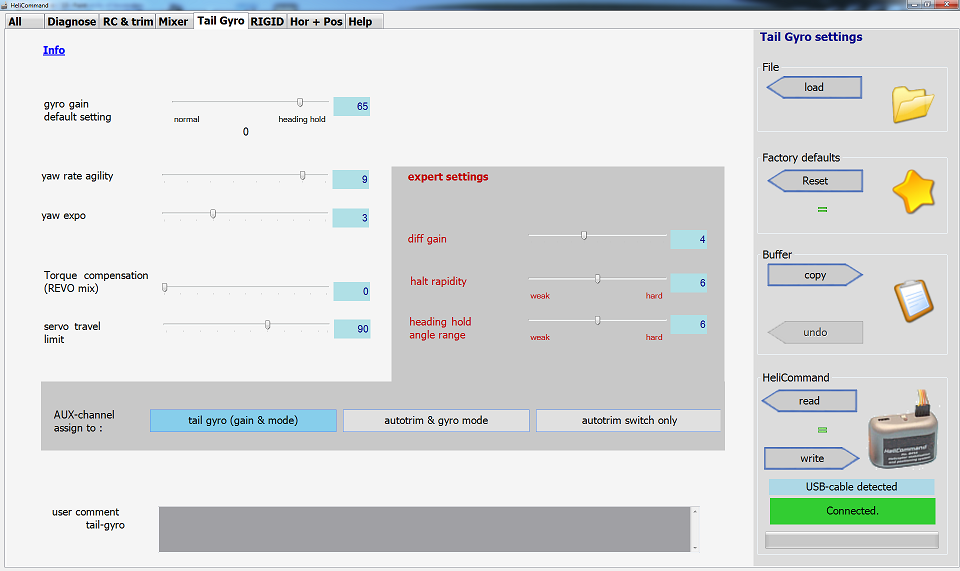
gyro gain default setting - установка режимов компенсационного удержания хвоста и курсового удержания хвоста. Бегунок показывает соотношение этих режимов удержания. Не запускайте вертолёт с 0 значением !!! , так как скорее всего это приведёт к отключению всех систем стабилизации и вертолёт сильно закрутит при взлёте.
Компенсационное удержание normal - обычный режим гироскопа, когда при воздействии прецессии закручивания от основного вала, гироскоп определяет величину отклонения и компенсирует её обратной работой лопастей хвостового ротора, предотвращая закручивания вертолёта. Однако, возможно постепенное смещение по кругу, так как гироскоп в этом режиме не определяет положение вертолёта в пространстве.
Курсовое удержание heading hold - продвинутый режим стабилизации, когда помимо удержания прецессии хвоста, гироскоп помнит изначальный курс вертолёта по горизонту и принудительно его удерживает в заданном направлении. Как только пилот вручную скорректирует курс, гироскоп поправит курсовое направление и будет пытаться далее его удерживать. Рекомендую использовать этот режим в полёте, но для начала не устанавливайте значение бегунка выше 80 , так как сильно жёсткое удержание хвоста может привести к вибрациям по горизонту, ибо гироскоп не будет успевать стабилизировать направление.
servo travel limit - ограничение движения тяги сервомашинки. При сильном или резком отклонении, тяга может перевести автомат перекоса хвостовых лопастей в предельно допустимое положение. Так как дальше механически двинуть тягу не получится, это приведёт к повышенному напряжению внутри сервомашинки и возможному её повреждению (может сгореть или сломать редуктор). Поэтому нужно чётко ограничить допустимые движения тяги хвоста.
AUX-channel - каким образом будет определяться на пульте переключение режимов стабилизации. Нужно выбрать бегунок или рычажок на пульте и определить радиоканал для выбора режима стабилизации.
Вообще это серьёзный вопрос науки и практики - настройка стабилизации хвостового оперения. На работу этой системы может повлиять: качество сборки гироскопа, длинна хвостовой балки, скорость хвостовой сервомашинки (нужны специальные высокоскоростные цифровые для хвостов), тип и длинна хвостовых лопастей, передача крутящего момента через вал или ремень, качество сборки хвостового редуктора и возможно его охлаждение и тд. Но ясно то, что хвост должен держать курс при любых полётных режимах и желательно чётко без каких либо непредсказуемых отклонений !!! Естественно, настройки гироскопа определяются индивидуально на каждой модели вертолёта и требуют самого тщательного и деликатного отношения.
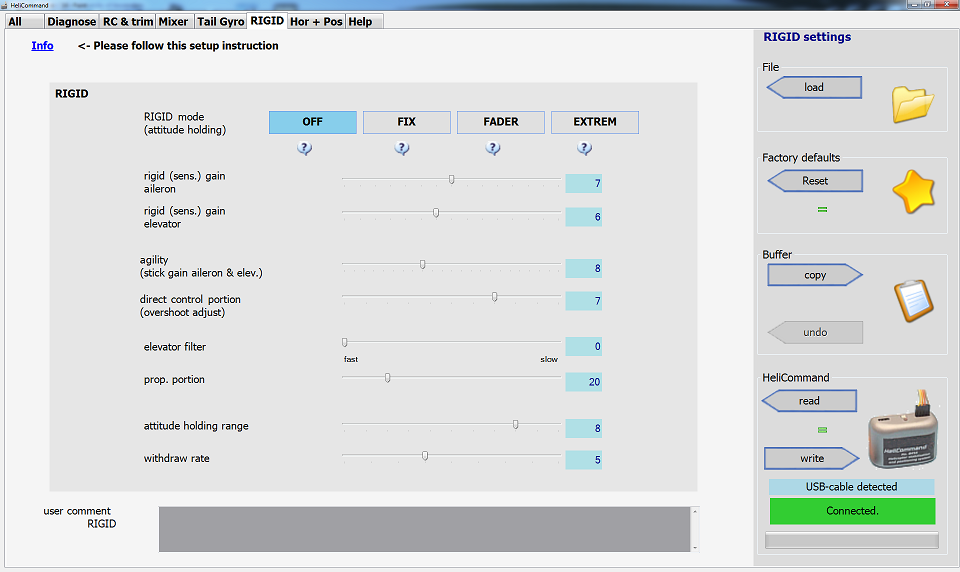
FLYBARLESS Настройки виртуальной сервооси
HeliCommand позволяет полностью взять на себя управление FlyBarless, что может стать причиной перехода на другой тип автомата перекоса на вертолёте.
Признаюсь, что в данный момент никогда не летал на вертолётах FlyBarless и особо пока не стремлюсь этим заниматься. В принципе, весьма продвинутый тип автомата перекоса, который выдаёт потрясающие полётные характеристики с экономией потребления энергии. Однако, требует очень грамотной и тонкой электронной настройки, так как в случае малейших отклонений приводит к серьёзным авариям.
Rigid mode (attitude holding) отображает режимы FlyBarless , на примере этот режим отключён OFF.
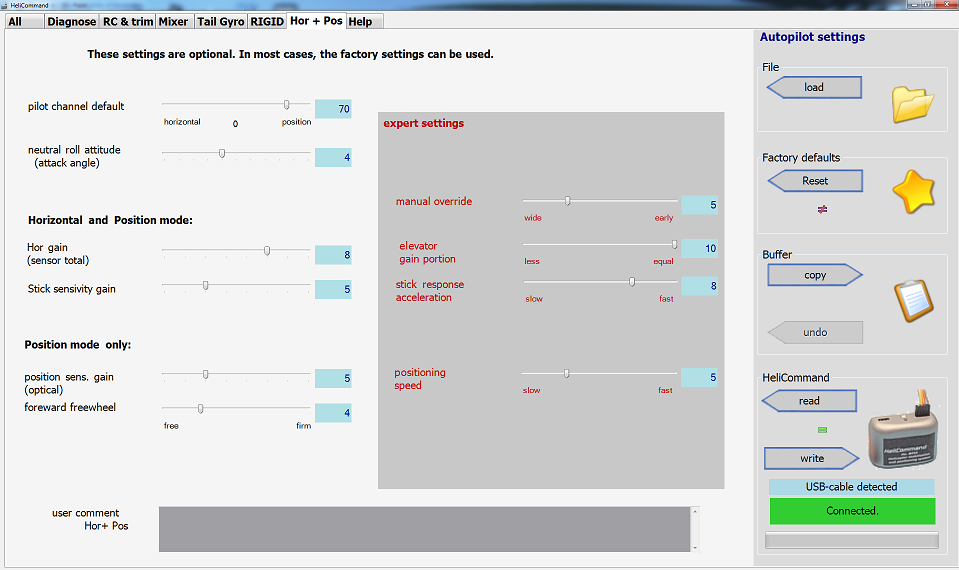
Настройка режимов горизонтального удержания и позиционирования
Пожалуй самый деликатный раздел по настройке HeliCommand. Мои рекомендации опробованы на эклектическом вертолёте Hawk Pro 600 класса.
Horizontal mode режим стабилизации вертолёта по авиагоризонту - позволяет свободно летать, но постоянно стремится удерживать плоскость вращения несущих лопастей в горизонтальном положении.
Position mode режим позиционирования вертолёта - стремится удерживать в фиксированной точке, стабилизируя по авиагоризонту.
Hor gain (sensor total) чувствительность оптического (лазерного) сенсора в режиме стабилизации. Параметр 8 стабильно держит авиагоризонт.
Stick sensivity gain чувствительность рукояток пульта. На сколько должен отклоняться автомат перекоса при движении рукоятки в режиме стабилизации.
position sens. gain (optical) чувствительность оптического (лазерного) сенсора в режиме позиционирования. Параметр 6 стабильно держит авиагоризонт, а вот более приводит к частым вибрациям из-за невозможности удерживать вес вертолёта.
foreward freewheel чувствительность удержания курсового перемещения в режиме позиционирования. Вертолёт стоит на месте, но при ручном управлении способен перемещаться вперёд - назад для изменения позиции (естественно изменяя курс хвостом). Параметр 8 позволяет стабильно перемещаться по горизонтали без рывков. free (свободнее) firm (жестче)
manual override
elevator gain portion уровень отклонения элеватора для движения вперёд - назад, у меня максимальный для лучшей манёвренности.
stick response acceleration ускорение движения сервомашинок при движении рукояток пульта.
position speed как быстро должен остановиться вертолёт при переходе в режим позиционирования. Слишком высокий показатель может заставить вертолёт «клевать» при торможении.
pilot channel default в случае потери сигнала от пульта, автопилот автоматически переводит полёт в указанный режим стабилизации Horizontal или Position по уровню ползунка.
neutral roll attitude (attack angle) нейтральное положение уровня атаки лопастей (тяги двигателя).
Рекомендации по настройкам и пилотированию
Когда будете подключать HeliCommand на вертолёт, ему нужна подпитка от батареи для настроек (он работает не как флешка). На электрическом вертолёте, лучше запитайте его от отдельной батареи 6V, во избежание непроизвольного запуска двигателя. Обязательно добейтесь включения всех трёх полётных режимов, не всегда с первого раза HeliCommand подключается правильно. Запускайте вертолёт в отключенном режиме с красным диодом - так кажется меньше глючит при подключении. Взлетайте лучше в режиме стабилизации (жёлтый диод на датчике) - он самый безопасный. Никогда не взлетайте в режиме удержания (зелёный диод) - при взлёте всё равно будут отклонения от точки удержания и вертолёт сильно штормит. Сначала взлетите на 2 метра над землёй в жёлтой стабилизации, а затем плавно без рывков переключите в зелёный удержания - вертолет должен замереть на месте, возможно с небольшим уходом по курсу. На всякий случай при переключении в зелёный, держите палец на тумблере переключателя в жёлтый, если вдруг вертолёт начнёт кидать в стороны - немедленно уходим в жёлтый стабилизации. Садим вертолёт в обратном порядке - в режиме удержания не советую. HeliCommand не боится высоты и удерживает в точке достаточно высоко. Зато HeliCommand не любит воды и снега - лазерный луч отражается от поверхности и курсовой датчик глючит. При минусовой температуре лучше не летать. В сумерках HeliCommand держит не плохо (лазеру темнота не помеха), но не стоит летать ночью. Подключите канал управления оборотами двигателя через HeliCommand - так будет лучше удерживать высоту без проседаний в полёте. Ни в коем случае не смотрите на линзу лазера в работающем HeliCommand - можете испортить зрение !!! И естественно, следите за чистотой линзы, иначе как HeliCommand будет видеть землю ??? :)
Технические характеристики
M-series: HeliCommand RIGID V.2
За всю историю было сделано немало безуспешных попыток создать полноценную
систему стабилизации для радиоуправляемых моделей вертолетов. Но при этом все
средства стабилизации сводились либо к простым дополнительных гироскопам, либо
световым или тепловым сенсорам, работающим при условии наличия чистого
горизонта, нормальной температуры при отсутствии препятствий к проникновению
световых лучей.
Несмотря на то, что подобных систем стабилизации, гарантирующих полноценную
стабильность модели, достаточно много, неоспоримым фактом является их
неспособность измерить угол отклонения вертолета относительно вектора силы
тяжести и невозможность сохранения постоянного географического положения. Эти
проблемы решаются только как минимум при наличии установленной GPS-системы на
модели.
Система стабилизации HeliCommand:
Это привело к созданию новой технологии «опознавания земли», которая намного
проще, дешевле GPS и одновременно способна работать гораздо более точно вблизи
земли: нежелательные движения измеряются точно и автоматически не менее точно
компенсируются.
Дополнительным преимуществом над GPS является способность системы работать в тех
местах, где места проведения полетов близко расположены к зданиям и деревьям и
даже в закрытых помещениях. Несомненными достоинствами системы, которые ранее не
наблюдались у ее аналогов, являются компактность, небольшой вес и приемлемая
стоимость.
Область применения:
Наилучшим образом подходит в качестве помощи начинающим пилотам. При
максимальном установленном значении стабилизации, система позволяет управлять
моделью вертолета без какой-либо посторонней помощи.
Имеет встроенную функцию безопасности для более опытных пилотов, уменьшающую
риск падения (аварийная кнопка).
Является несомненным подспорьем при управлении моделью в течение длительного
времени и когда управление происходит не в лучшем физическом состоянии (с
похмелья ;).
Встроенные функции системы стабилизации:
Гироскоп: Устройство HeliCommand имеет встроенный высококачественный AVCS (heading-hold)
гироскоп. Но при желании можно использовать отдельный гироскоп.
Автоматическое триммирование: Одним нажатием кнопки на передатчике, возможно,
автоматически установить нейтрали сразу трех осей: тангажа, крена и курса. Для
функции автопилота триммирование необходимо выполнять только во время первого
полета (после установки). В то же время триммирование может выполняться и при
ручном управлении.
Микшер автомата перекоса: В HeliCommand встроены микшеры автоматов перекоса: H2,
HR3, H4. Это делает возможным управлять с его помощью всеми типами вертолетов,
используя самые простые системы радиоуправления моделями (не имеющих подобных
микшеров). В этом случае для соответствующей настройки требуется персональный
компьютер и необходимое программное обеспечение.
Управление: Эффект стабилизации/позиционирования может настраиваться
пропорционально, либо полностью отключаться для 3-D полетов.
Режимы работы:
Stage 0 - Выключен (обыкновенный полет)
Stage 1 - Удержание высоты (стабилизация по горизонту)
Stage 2 - Удержание положения и скорости
Fail-safe: Функция fail-safe при работе с FM приемником. Если пропадает связь
между приемником и передатчиком, fail-safe сразу устанавливает тангаж и крен в
нейтраль, в то время как общий шаг поддерживает в известном последнем значении.
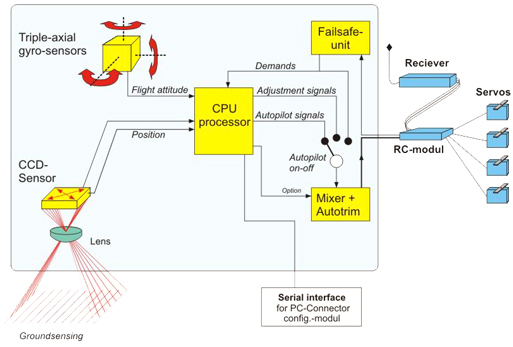
Работа HeliCommand:
Для контроля и управления моделью совместно с программным обеспечением
используется две независимых системы. Измерение положения происходит на основе
данных сенсора, который работает подобно датчику компьютерной оптической мыши.
Разница заключается в том, что контроль продолжается на высоте 3 метра и выше,
даже когда день идет к закату. Датчик движения «просматривает» землю во время
полета вертолета и вполне заменяет глаз пилота.
Сенсор способен определить все относительные изменения в горизонтальной
плоскости, анализируя контраст точек на земной поверхности, подобно компьютерной
мыши на плоской поверхности. Дополнительная система стабилизации по высоте
содержит три электронных гироскопа и работает, используя за основу искусственный
горизонт и полностью независима от текущей видимости. Применение подобной
технологии в HeliCommand позволяет стабилизировать наклон вертолета относительно
горизонтальной плоскости, независимо от степени освещения (чего нет в других
типах автопилотов) и также установить необходимую высоту.
Только лишь в исключительных случаях, таких как: полная темнота, положение
модели над водой или снегом сенсор не может усилить сигнал. В такой ситуации,
когда получаемого сигнала недостаточно, оборудование, хранящее данные о
положение вертолета, автоматически выполняет стабилизацию модели.
На самом деле, подобная ситуация недостаточности сигнала не является
экстраординарной. Если она продолжается в течение более длительного времени, то
вертолет автоматически переводится из режима удержания положения в режим
стабилизации. В этом случае пилот, обнаруживший это легко компенсирует возникший
дрейф модели. Подобная ситуация может происходить к примеру в закрытых
помещениях, при этом пилот при желании может принудительно переводить модель в
режим стабилизации.
Технические особенности характеристики HeliCommand:
Возможность стабилизации географического положения и высоты полета;
Новый тип сенсора и тип считывания, независимый от видимого горизонта;
Электронный трех осевой гироскоп;
Возможность настройки степени стабилизации.
Размеры: ДхШхВ, мм 55x35x12.5
Вес, грамм 33
Рабочее напряжение, В 4.8-6
![]()
![]()
![]()